摘要:
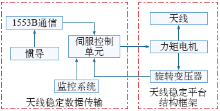
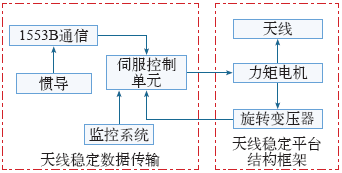
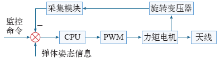
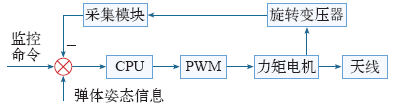
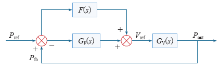
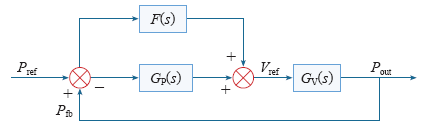
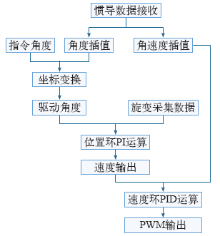
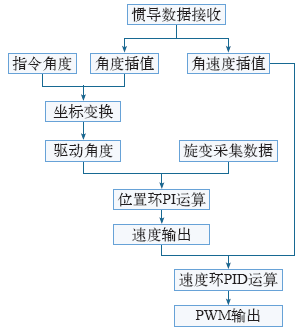
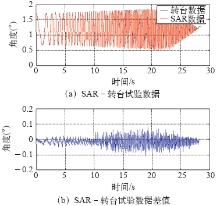
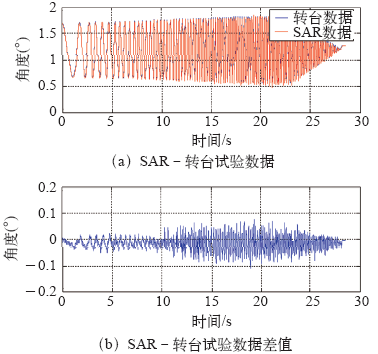
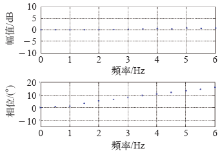
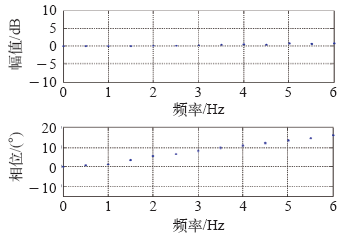
以捷联式稳定平台为研究对象,介绍了两轴稳定平台工作原理及其组成。建立稳定平台位置和速度闭环的控制系统数学模型,推理得出分段PID控制算法。为提高系统的响应速度和跟踪精度,引入基于角度和角加速度补偿的前馈控制算法。对前馈补偿的稳定平台控制算法进行了试验验证,结果表明前馈控制应用在捷联式稳定平台中可提高系统的响应速度和跟踪精度,满足了任务要求。
中图分类号:
胡松涛,李旺. 弹载捷联式高精度稳定平台设计与研究[J]. 电气工程学报, 2015, 10(7): 78-81.
Hu Songtao,Li Wang. Research and Design of High Precision Missile-Borne Strap-Down Stabilization Platform[J]. Journal of Electrical Engineering, 2015, 10(7): 78-81.