摘要:
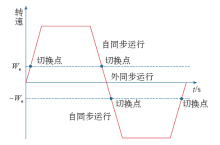
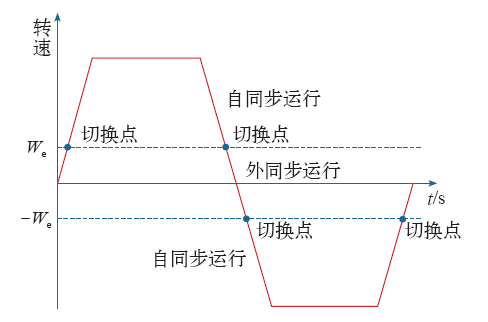
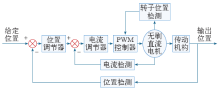
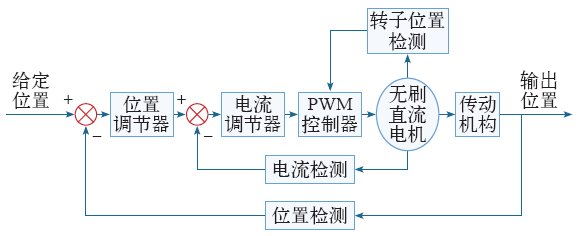
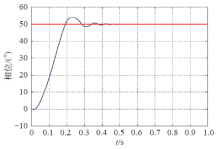
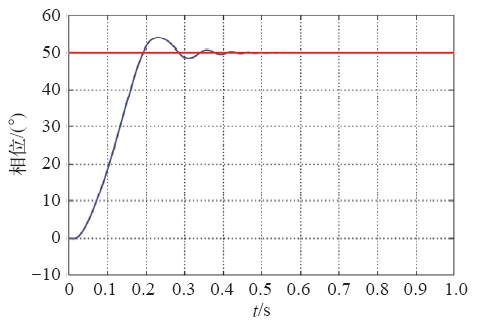
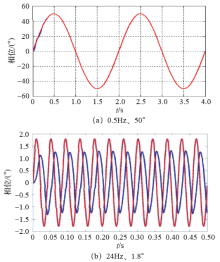
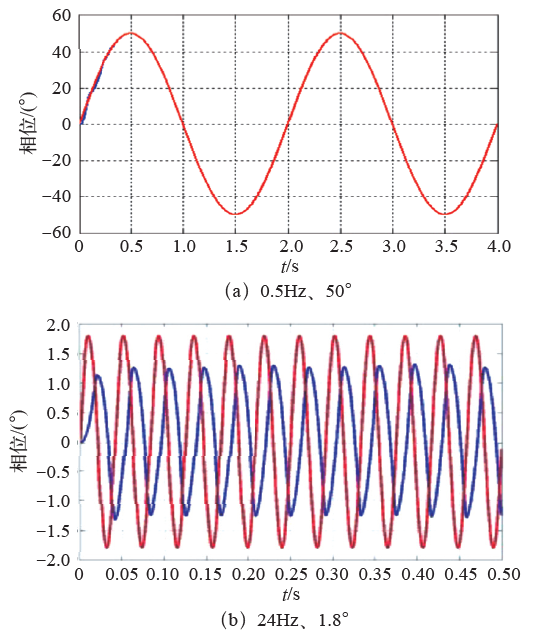
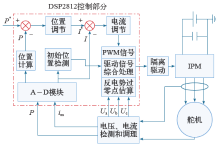
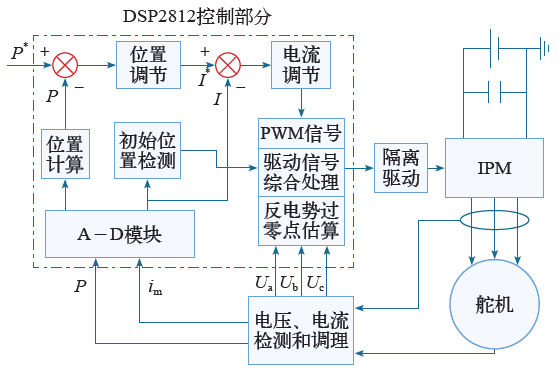
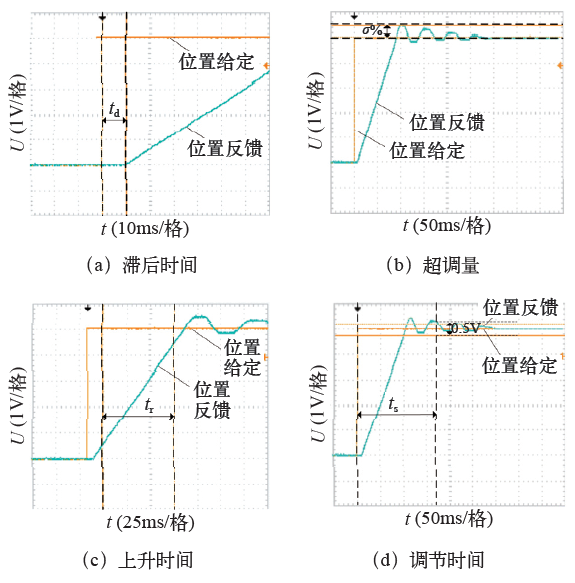
电机舵机伺服系统特殊的应用场合及恶劣的工作环境对驱动电机的位置检测传感器提出了苛刻要求。本文针对基于无刷直流电机的舵机伺服系统,采用短时脉冲注入法判别其初始位置,结合外同步加速,自同步运行的无位置传感器起动法,实现舵机伺服系统中无刷直流电机的快速控制,并将其与舵机伺服系统在有位置传感器控制下的动、静态性能进行比较,仿真和试验结果表明,提出的无位置传感器控制方案能有效地实现舵面位置的高性能跟踪。
中图分类号:
魏佳丹,陈长春,刘颖. 基于无位置传感器技术的舵机伺服系统特性研究[J]. 电气工程学报, 2016, 11(1): 19-23.
Wei Jiadan,Chen Changchun,Liu Ying. Research on the Characteristics of Rudder Servo System Based on the Sensorless Control Method[J]. Journal of Electrical Engineering, 2016, 11(1): 19-23.