摘要:
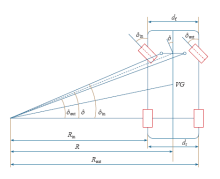
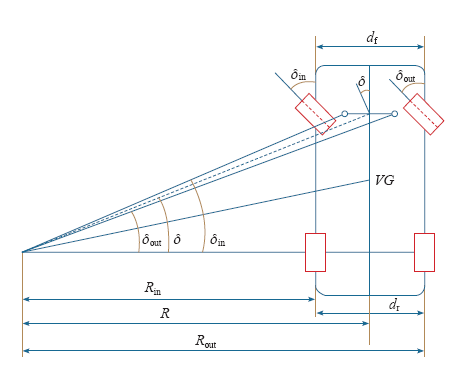
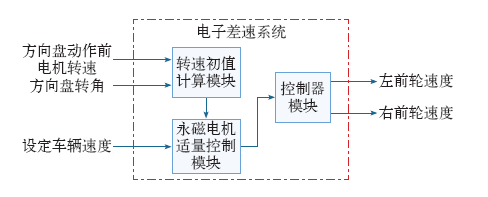
针对电动汽车电子差速系统,通过对永磁电机和传统的机械差速转向方式进行理论研究分析,提出了基于两台永磁电机作为驱动电机的转矩平衡自适应控制方案。针对现有的电子差速方案在复杂情况下的路面无法进行有效控制的问题,本文参照传统的机械差速给出了解决方案,计算了转向时各个车轮的速度与转向角度变化的关系,以及转向时各个车轮的转速、功率分配关系,给出了各个车轮协调工作的控制方法,从而确定了电子差速的控制策略。
中图分类号:
吕长吉,张炳义,冯桂宏. 基于转矩平衡的自适应电子差速控制策略研究[J]. 电气工程学报, 2018, 13(8): 26-31.
Lü Changji,Zhang Bingyi,Feng Guihong. Study of Adaptive Electronic Differential Control Strategy Based on Torque-Balance[J]. Journal of Electrical Engineering, 2018, 13(8): 26-31.